|
Mr. Rama Aravind Vorray |
| Home | Projects | Publications | Profile | Contact |
A Visualization Tool to be used in the process of installation of VICON Motion Capture cameras. It simulates 3D capture volume of an array of VICON motion tracking cameras using voxels and provides an intuitive GUI for manipulating various parameters that govern the capture volume.
Developed in C++ using OpenGL API and MFC. VICON systems are used within Virtual Environments to track objects and within the film and game industry to capture human motion. The VICON tracking system comprises of a set of independently positioned digital cameras that are able to track and determine the position of a large number of reflective markers. The accuracy of the system is very much dependant on the number of cameras that can see a single marker.
Issues include:Download the ZIP file and simulate capture volume of cameras in the way described below.
After downloading the ZIP file, extract it and run the EXE file. A screen like the one shown below should be seen.
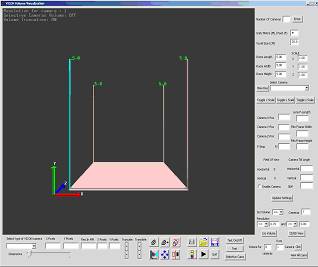
The scene depicts a room with floor and four pillars (their appearance can be toggled). Now type in number "four" (4) in the top most Edit Text box entitled "Number of Cameras" and click on the Button next to it entitled "Enter", you should see a message like "Performing Calculations. Please Wait..." on top of the View Window. After two or three seconds you should be able to see an apple shaped capture volume along with four cameras placed (by default) on top four corners of the room. (first figure in the screen shots below)
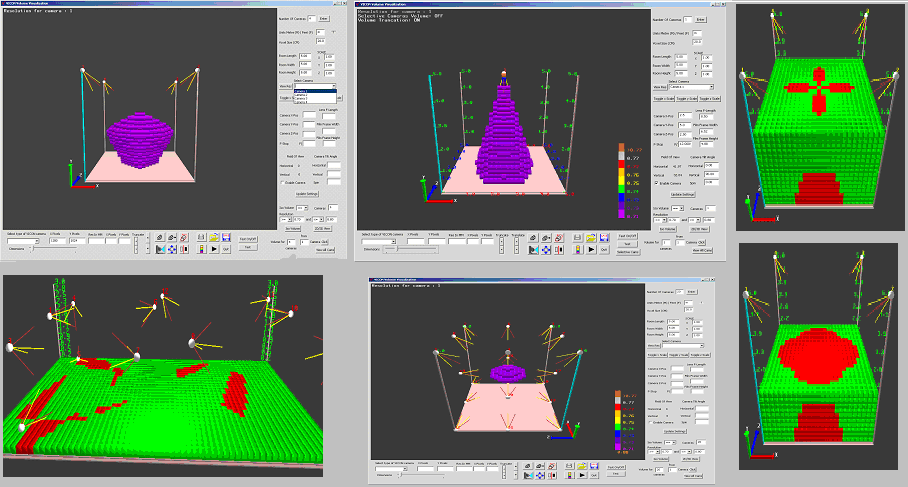
You can truncate the volume and you can also view 2D view of the volume (slicing technique). For truncating the volume Use the Spin Control entitled "Truncate". The down arrow truncates below and up arrow undoes the truncation. You should hold on the down arrow initially for a bit more time as the capture volume starts from certain height in the room and the default position of truncation is placed at top position of the room. For viewing volume in 2D, click on the button "2D/3D View" located at bottom right hand side of the application window. The view can be toggled to 3D by clicking the same button again.
This application uses hardware acceleration capability of graphics card. The capture volume is rendered using Vertex Buffers and display lists in OpenGL. It is basically a volume visualization tool but specifically for visualizing capture volume of VICON cameras. See the Full report (PDF). This Report includes an inexhaustible user guide, which can be found as Appendix 3.
Below are its screen shots.
Open Loop Computer Control Systems – Interfacing a small user guidable program operated tram to a Personal Computer. This project is on building a computer controlled electronic robot. The robot built here is a very simple small tram which can be made to move using the computers keyboard.
Low level C has been used along with Assembly language to program the Parallel Port (LPT01). Voltage levels on the pins of this parallel port are varied by giving them 1 and 0 appropriately. Accordingly I have built a circuit using 5V DC Relays which sense these voltage level variations and make 5V DC motors placed in the tram to rotate which moves the tram.
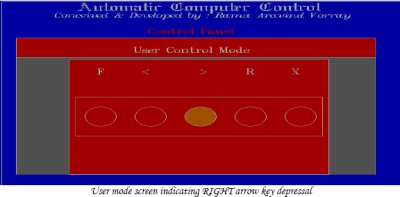
Left and Right steering directions are achieved by rotating the tram backwards 270° and 90°, respectively.View the report for full details on the implementation of these techniques.
Database Management System in C. Developed on DOS Platform in C using TurboC++ IDE. Aim of the project is to maintain and manage Student and Staff databases of my Polytechnic. Interfaces have been provided for easy manipulation of data like, modifying, creating new records, retrieving, deleting and printing payrolls, marks sheets, etc. But there is no soft copy available for this project now.
© V Rama Aravind.
Last Updated: 15 June 2009.
Main Website